Dans les systèmes robotiques multi-axes, la précision de position, la répétabilité et la réactivité dynamique de l'effecteur final ne sont pas déterminées uniquement par la sophistication de l'algorithme de contrôle. Ils sont fondamentalement limités par la bande passante mécanique, les caractéristiques de jeu et la densité de couple des actionneurs articulaires individuels qui composent la chaîne cinématique. Un robot articulé à six axes avec une précision d'effecteur terminale inférieure au millimètre nécessite que chaque articulation fournisse une résolution de positionnement angulaire de l'ordre de la seconde d'arc, avec une rigidité en torsion qui empêche la déviation sous les moments induits par la charge utile.
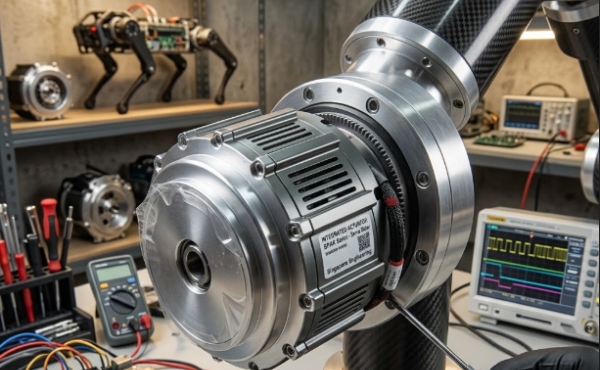
L' actionneur de moteur commun de robot : ND-A5215-10 du groupe iHF représente une solution spécialement conçue pour cette couche de contraintes. Plutôt que d'assembler des servomoteurs, des boîtes de vitesses et des encodeurs génériques dans une configuration commune, iHF Group a intégré ces sous-systèmes dans un module d'actionneur unifié optimisé spécifiquement pour la dynamique mécanique, thermique et de contrôle de l'articulation robotique.
Architecture électromécanique intégrée
Topologie de moteur couple sans cadre
Les conceptions traditionnelles de joints de robot utilisent des servomoteurs logés couplés à des réducteurs à entraînement planétaire ou harmonique via des accouplements mécaniques. Cet assemblage introduit des erreurs d'alignement, un jeu d'accouplement et une longueur axiale accrue qui compromettent la compacité et la réponse dynamique du joint.
Le ND-A5215-10 utilise une architecture de moteur couple sans cadre dans laquelle le rotor est directement intégré dans l'arbre de sortie commun et le stator dans le boîtier commun. Cette élimination du boîtier moteur séparé et des interfaces d'accouplement réduit la longueur du joint de 30 à 40 % par rapport aux assemblages conventionnels, permettant ainsi des rapports charge utile/poids plus élevés et des enveloppes de robot plus compactes. Le moteur couple à entraînement direct fournit un couple continu de 15 Nm avec une capacité maximale de 45 Nm, offrant la densité de couple élevée à basse vitesse qu'exige l'articulation robotisée sans les pertes d'efficacité et le jeu d'une réduction de vitesse à plusieurs étages.
Réduction de précision de l'entraînement harmonique
Bien que les moteurs couple sans cadre offrent une excellente densité de couple, les vitesses de sortie requises pour les profils de mouvement d'articulation de robot typiques (généralement 30 à 120 tr/min) nécessitent une réduction de vitesse. Le ND-A5215-10 intègre un réducteur à entraînement harmonique avec un rapport de démultiplication de 100:1, permettant une réduction en un seul étage avec des caractéristiques sans jeu que les systèmes planétaires ou cycloïdaux ne peuvent pas reproduire.
La technologie d'entraînement harmonique utilise une cannelure flexible déformée par un générateur d'ondes contre une cannelure circulaire, créant un engagement simultané de plusieurs dents qui répartit la charge sur 30 % des dents disponibles. Cette géométrie d'engagement permet une répétabilité de position de ±10 secondes d'arc et une rigidité en torsion supérieure à 20 000 Nm/rad, des spécifications qui se traduisent directement par la précision de l'effecteur final dans les configurations multi-axes.
La fabrication d'actionneurs de moteur articulés robotisés de précision du groupe iHF valide les composants d'entraînement harmonique grâce à la mesure du profil de la forme des dents flexibles, de la géométrie de l'alésage des cannelures circulaires et du faux-rond des roulements du générateur d'ondes. L'assemblage intègre des protocoles de précharge qui optimisent les modèles de contact de maillage sans induire de contraintes de flexion excessives qui compromettraient la durée de vie en fatigue.
Architecture de rétroaction à double codeur absolu
Le contrôle de position dans les articulations robotiques nécessite une rétroaction à deux points distincts : la position du rotor du moteur pour la commutation et le contrôle du courant vectoriel, et la position de l'arbre de sortie pour la fermeture de la boucle d'asservissement au niveau de l'articulation. Le ND-A5215-10 intègre deux codeurs absolus : un codeur multitours 23 bits sur le rotor du moteur et un codeur monotour 19 bits sur la sortie du variateur harmonique.
Cette configuration à double codeur permet des stratégies de contrôle avancées : compensation d'ondulation de couple via l'anticipation de la position du moteur, compensation du jeu via un retour de position de sortie et détection de collision via une estimation instantanée du couple à partir du courant du moteur et de la dérivée de position. Le codage absolu élimine les séquences de référencement à la mise sous tension, réduisant ainsi le temps de démarrage du robot et permettant une reprise du fonctionnement en toute sécurité après un arrêt d'urgence.

Gestion thermique et performances en service continu
Ingénierie des chemins de chaleur
Les moteurs couple sans cadre génèrent des pertes résistives (I²R) dans les enroulements du stator qui doivent être dissipées pour éviter la dégradation de l'isolation et la démagnétisation des aimants du rotor aux terres rares. Dans les configurations de joint compactes où le moteur est intégré dans le boîtier de joint, le refroidissement par air conventionnel n'est pas pratique.
Le ND-A5215-10 utilise un circuit de refroidissement liquide intégré dans le boîtier commun, avec des passages de liquide de refroidissement usinés dans la structure en alliage d'aluminium qui entrent directement en contact avec la pile de tôles du stator. Cette conception atteint une résistance thermique du bobinage au liquide de refroidissement de 0,15 K/W, permettant un fonctionnement continu au couple nominal avec des températures d'entrée du liquide de refroidissement allant jusqu'à 35°C. Pour les applications sans disponibilité de liquide de refroidissement dans les installations, iHF Group propose une variante refroidie par air optimisée thermiquement avec une géométrie d'ailettes étendue et une convection forcée interne.
Modélisation thermique et protection
iHF Group fournit des modèles thermiques calibrés pour des profils de mouvement de robot spécifiques, permettant aux clients de prédire l'augmentation de la température des enroulements selon les cycles de service anticipés. Les capteurs de température intégrés (PT1000 RTD intégrés dans les spires d'extrémité du bobinage) assurent une surveillance thermique en temps réel avec une protection contre la surchauffe qui déclasse la commande de courant avant que les seuils de dommages ne soient atteints.
Intégration mécanique et standardisation des interfaces
Architecture à arbre creux
Le ND-A5215-10 présente un alésage central traversant de 15 mm de diamètre, permettant le passage des câbles d'alimentation, des câbles de signaux, des conduites pneumatiques ou des fibres optiques à travers le centre du joint plutôt que de les acheminer vers l'extérieur. Cette conception à arbre creux élimine la complexité de la gestion des câbles dans les robots multi-axes, réduit les risques d'accrochage pendant le mouvement et maintient une géométrie extérieure propre pour les applications robotiques collaboratives où la proximité humaine est anticipée.
Compatibilité des interfaces de montage
iHF Group normalise les interfaces mécaniques ND-A5215-10 selon les modèles de brides ISO 9409-1, permettant une intégration directe avec les bras de robot disponibles dans le commerce sans fabrication d'adaptateurs personnalisés. L'arbre de sortie intègre une interface clavetée ou cannelée avec une capacité de transmission de couple dépassant la sortie maximale de l'actionneur, empêchant ainsi une défaillance de l'interface en cas de décrochage ou de collision.


Intégration du système de contrôle
Protocole de communication EtherCAT
Le ND-A5215-10 intègre l'électronique du servomoteur avec la communication par bus de terrain EtherCAT, permettant des temps de cycle de 1 ms pour les mises à jour des commandes de position et de 125 μs pour la fermeture de la boucle de couple. Cette bande passante de communication prend en charge des algorithmes avancés de contrôle de mouvement : contrôle d'impédance pour une limitation collaborative de la force du robot, suppression des vibrations grâce au retour d'accélération au niveau des articulations et maintenance prédictive grâce à l'évolution des paramètres du moteur.
Intégration des fonctions de sécurité
La sécurité fonctionnelle SIL 3 / PL e est obtenue grâce à une surveillance de position redondante (deux codeurs avec comparaison croisée), un circuit d'arrêt sécurisé du couple (STO) avec verrouillages matériels et un contrôle sûr des freins pour les axes chargés par gravité. iHF Group fournit une documentation de sécurité, notamment des analyses FMEDA et des rapports de tests d'injection de défauts, pour soutenir les processus de marquage CE et de certification de sécurité fonctionnelle des clients.
Domaines d'application
Robotique collaborative
L'enveloppe compacte du ND-A5215-10, sa faible inertie réfléchie et ses capacités de contrôle sensibles à la force le rendent adapté aux articulations de robots collaboratifs où l'interaction homme-robot nécessite une sécurité intrinsèque grâce à la surveillance du couple et de la position plutôt qu'à une protection externe. La grande rétroconduite du lecteur harmonique permet un mouvement conforme lorsque des forces externes sont appliquées, le système de contrôle détectant des forces de contact inférieures à 150 N au niveau de l'effecteur final.
Robotique chirurgicale et médicale
Les applications des robots médicaux exigent une compatibilité en matière de stérilisation, une compatibilité électromagnétique pour les environnements de salle d'opération et une précision de position pour la manipulation des tissus. iHF Group propose le ND-A5215-10 avec des finitions de surface de qualité médicale, des lubrifiants biocompatibles et des assemblages de câbles blindés qui répondent aux exigences de compatibilité électromagnétique CEI 60601-1.
Fabrication de semi-conducteurs et d'électronique
La compatibilité avec les salles blanches (classe ISO 3), la génération minimale de particules et le fonctionnement sans vibrations sont essentiels à la manipulation des plaquettes et à l'assemblage électronique. L'entraînement harmonique fermé et le moteur sans cadre du ND-A5215-10 éliminent les débris d'usure des brosses, tandis que l'équilibrage de précision et la précharge des roulements minimisent la transmission des vibrations aux équipements de processus sensibles.
FAQ
Q : Quelle est la capacité de charge utile maximale lors de l'utilisation du ND-A5215-10 dans une configuration de robot à six axes ?
R : La capacité de charge utile dépend de la longueur du bras, des profils d'accélération et du cycle de service, et non du seul couple de l'actionneur. Pour un robot à six axes typique d'une portée de 800 mm avec le ND-A5215-10 aux articulations 2, 3 et 4 et des actionneurs plus petits au niveau des articulations du poignet, la charge utile maximale est d'environ 10 à 15 kg à une accélération de 1 g avec un cycle de service de 50 %. iHF Group fournit des outils de simulation cinématique pour optimiser la sélection des actionneurs pour des géométries de robots et des exigences de mouvement spécifiques.
Q : Le ND-A5215-10 peut-il fonctionner sans refroidissement liquide dans des environnements ambiants jusqu'à 40°C ?
R : La variante refroidie par air maintient un couple continu nominal jusqu'à une température ambiante de 35 °C avec convection naturelle, et jusqu'à 40 °C avec un déclassement à 80 % du couple nominal. Pour un fonctionnement prolongé au-dessus de 40°C ou dans des installations confinées avec un débit d'air restreint, un refroidissement liquide est recommandé. Le service de simulation thermique d'iHF Group peut prédire les performances pour des conditions d'installation spécifiques.
Q : Quel intervalle de maintenance est recommandé pour le réducteur d'entraînement harmonique ?
R : Dans des conditions de fonctionnement normales (couple nominal, charge de choc modérée, lubrification adéquate), la cannelure flexible à entraînement harmonique présente une durée de vie en fatigue supérieure à 10 000 heures de fonctionnement. Le groupe iHF recommande une inspection annuelle de l'état des roulements de sortie via une analyse des vibrations et un remplacement du lubrifiant toutes les 5 000 heures de fonctionnement ou tous les 2 ans, selon la première éventualité. Les fonctions intégrées de surveillance de l'état peuvent prolonger ces intervalles grâce à des algorithmes de maintenance prédictive.
Q : Le ND-A5215-10 est-il compatible avec les servocontrôleurs tiers ?
R : Le ND-A5215-10 est optimisé pour l'intégration avec le servomoteur intégré du groupe iHF, mais les paramètres du moteur (résistance de phase, inductance, constante de contre-EMF, protocoles d'encodeur) sont documentés pour prendre en charge l'intégration de contrôleurs tiers. Les clients doivent vérifier la compatibilité de la bande passante de la boucle de courant et de l'algorithme de commutation avec l'équipe d'ingénierie d'application du groupe iHF avant de spécifier des contrôleurs non intégrés.
Q : Quelle est la spécification du jeu et comment affecte-t-elle la répétabilité du robot ?
R : Le réducteur d'entraînement harmonique atteint un jeu nul grâce à sa géométrie de maillage élastique. L'hystérésis mesurée au niveau de l'arbre de sortie est généralement de ±3 secondes d'arc dans des conditions à vide. Dans les applications robotiques pratiques, la conformité structurelle et la résolution de l'encodeur dominent la répétabilité plutôt que le jeu des engrenages, le ND-A5215-10 contribuant à moins de 5 % de l'erreur totale de répétabilité du système dans les chaînes cinématiques bien conçues.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Demander un devis
Demander un devis 










