La poussée mondiale vers une automatisation industrielle avancée, des robots collaboratifs (cobots) à charge utile élevée, des bras médicaux chirurgicaux et des systèmes de défense multi-axes impose des exigences extrêmes aux actionneurs électromécaniques. Les servomoteurs traditionnels emballés ajoutent souvent trop de volume, de poids et de conformité mécanique aux conceptions de joints. Pour obtenir un mouvement fluide et à couple élevé dans des espaces restreints, les ingénieurs de conception modernes se tournent vers des moteurs à joint de couple intégrés sans cadre .
En intégrant le stator et le rotor directement dans le boîtier structurel de la machine, ces kits intégrés éliminent les arbres, roulements et accouplements inutiles. Cependant, pour obtenir une véritable précision dans les joints compacts, il faut bien plus qu'une simple intégration de base ; cela nécessite un réglage magnétique avancé, une mécanique de rétroaction précise et une connectivité système simplifiée.
💡 Conception magnétique avancée : maximiser la densité de couple tout en atténuant le rouage
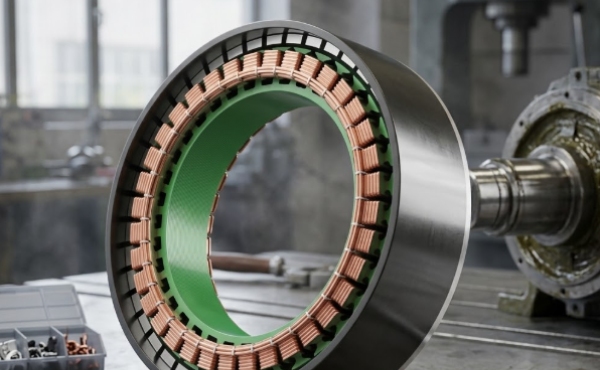
Dans le contrôle de mouvement de précision, les performances d'un moteur sont souvent limitées par ses limites thermiques et le frottement magnétique inhérent. Les moteurs standard sans cadre souffrent souvent d'un couple de crémaillère important (traction magnétique périodique entre les aimants du rotor et les fentes du stator) qui dégrade la précision du positionnement à basse vitesse.
Pour remédier à ces limitations, les joints robotiques de pointe mettent en œuvre une conception optimisée des fentes de moteur. En calculant l'inclinaison géométrique précise des fentes du stator ou en modifiant la disposition des aimants permanents sur le rotor, les ingénieurs peuvent réduire considérablement les effets de cogging. Cette conception produit une densité de couple remarquablement élevée, garantissant un couple maximal par unité de volume tout en maintenant une rotation fluide.
● Excellence du contrôle à basse vitesse : Grâce à cette architecture magnétique optimisée, le système maintient un contrôle précis à basse vitesse. Il élimine les problèmes de stick-slip courants dans les configurations à entraînement direct bas de gamme, ce qui est crucial pour le soudage de haute précision, le micro-assemblage et les applications chirurgicales délicates.
● Faibles vibrations et fonctionnement silencieux :ce réglage structurel garantit une réponse rapide, un fonctionnement stable, de faibles vibrations et un faible bruit. L’élimination de la résonance acoustique à haute fréquence est particulièrement vitale pour les salles d’opération médicales et les espaces de travail collaboratifs en salles blanches.
🛠️ Cinématique Mécanique : Intégration de Réducteurs Planétaires de Haute Précision
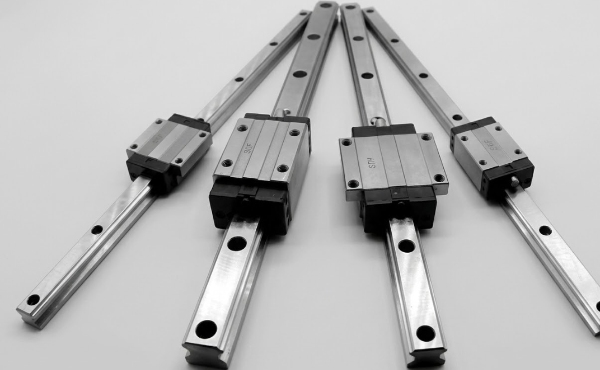
Un kit moteur sans cadre fournit un couple électromagnétique brut, mais la conversion de cette puissance en articulation robotique utilisable nécessite un système de réduction de vitesse haute performance. L'intégration d'un réducteur à engrenages planétaires de haute précision doté de profils d'engrenages hélicoïdaux avancés offre une solution très compacte et robuste.
Étalonnage à jeu ultra faible : les boîtes de vitesses commerciales standard introduisent un jeu important, ce qui ruine la répétabilité de la position. Les joints intégrés haut de gamme présentent une rondeur de racine dentaire inférieure à 3 minutes d'arc. Cette tolérance géométrique étroite garantit une rigidité en torsion exceptionnelle et minimise la perte de mouvement lors des cycles bidirectionnels.
Inversion de direction rapide : la faible inertie du rotor sans cadre, associée à l'ajustement précis des engrenages planétaires hélicoïdaux, permet une inversion rapide de la direction du moteur. L'actionneur peut pivoter instantanément sous une charge élevée sans introduire de chocs mécaniques ni solliciter la transmission.


🏢 Intelligence en boucle fermée : la norme d'actionnement du groupe iHF
Pour les constructeurs de robots industriels et les intégrateurs de systèmes d'automatisation, l'assemblage de stators, de rotors, d'engrenages à ondes de contrainte et d'encodeurs séparés provenant de différents fournisseurs présente un goulot d'étranglement frustrant en matière de fabrication. Les incompatibilités entre les composants entraînent souvent un décalage du signal, des problèmes de dilatation thermique et des procédures d'étalonnage complexes.
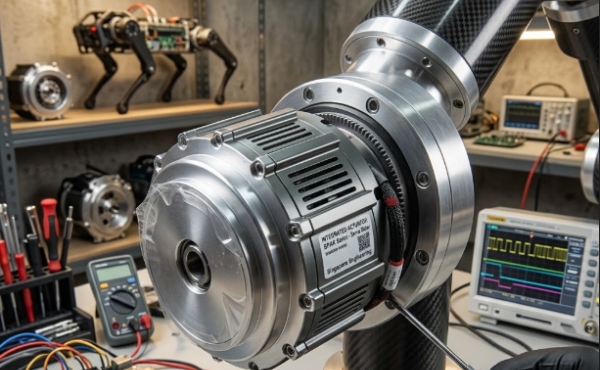
Pour résoudre ces défis industriels, iHF Group a conçu une solution de joint modulaire entièrement intégrée et hautes performances. En associant la technologie d'entraînement direct de précision à un matériel de retour avancé, les systèmes du groupe iHF offrent des performances d'entraînement direct inégalées dès la sortie de la boîte.
⚙️ Véritable contrôle multivariable en boucle fermée : les contrôleurs du groupe iHF permettent un contrôle complet et déterministe en boucle fermée du couple, de la vitesse et de la position. Les algorithmes avancés de contrôle orienté champ (FOC) traitent les profils de courant en temps réel, évitant ainsi les erreurs de suivi, même lors de mouvements hautement dynamiques.
📊 Architecture de rétroaction à double encodeur : pour éliminer les erreurs de positionnement causées par la déviation physique des engrenages sous de lourdes charges, le système prend en charge les encodeurs doubles pour améliorer encore la précision du contrôle de rétroaction. Un codeur incrémental ou absolu haute résolution surveille l'arbre du moteur à grande vitesse, tandis qu'un codeur absolu secondaire surveille directement le joint de sortie à basse vitesse. Cette configuration mesure et corrige en continu les micro-déviations mineures en temps réel.


🔌 Rationalisation de la topographie du système : architecture en chaîne
À mesure que les systèmes robotiques ajoutent davantage d'axes, tels que des cobots à 7 axes ou des structures humanoïdes complexes, la gestion du faisceau de câbles interne devient très complexe. Le passage de câbles d'alimentation et de retour dédiés depuis une armoire de commande centrale à travers chaque joint conduit à des faisceaux de câbles épais qui limitent le mouvement des joints et augmentent les risques de défaillance dus à une torsion continue.
Les joints haute densité modernes surmontent ce problème en intégrant une disposition de communication série peu encombrante. Le système prend en charge la configuration en série pour plusieurs unités, facilitant l'alimentation électrique et la transmission de données. En intégrant un micro-drive localisé à l'intérieur de chaque joint, un seul bus d'alimentation CC partagé et un câble Ethernet industriel haut débit (tel qu'EtherCAT ou CANopen) peuvent être acheminés séquentiellement d'un joint à l'autre. Cela réduit considérablement le poids total du câble, simplifie le routage physique et améliore la fiabilité globale du système.
❓ Analyse technique approfondie : questions et réponses sur l'industrie
Q1 : Comment une configuration à double encodeur protège-t-elle contre l'usure mécanique au fil du temps ?
R : Dans un système à codeur unique, si les engrenages planétaires subissent une usure ou un jeu mineur au fil des années de service, le contrôleur n'a pas conscience de l'erreur physique au niveau de la bride de sortie. En utilisant la prise en charge du double encodeur fournie par iHF Group, l'encodeur secondaire surveille directement la position réelle de l'outil. Même si une usure mécanique se produit à l'intérieur du réducteur, le système en boucle fermée compense automatiquement la variation, garantissant ainsi à votre robot une précision inférieure au millimètre tout au long de sa durée de vie opérationnelle.
Q2 : Pourquoi les engrenages hélicoïdaux sont-ils préférés aux engrenages droits dans les applications de joints à couple élevé ?
R : Les engrenages hélicoïdaux comportent des lignes de dents inclinées qui s'engagent progressivement plutôt que d'un seul coup. Ce contact progressif des dents augmente considérablement le rapport de contact total, répartissant ainsi des charges mécaniques élevées sur plusieurs dents. Cette disposition permet directement une rondeur de racine de dent inférieure à 3 minutes d'arc, réduit le bruit acoustique et fournit la résistance à la torsion supérieure requise pour les pics de couple soudains.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Demander un devis
Demander un devis